
The laboratory of Active Materials (Activ-lab) is dedicated to research activities focused on the design, development, and experimental testing of components based on active materials
Equipments
The laboratory is equipped with:
- a Z+ 20-10 power supply (Figure 1) by TDK-Lambda
- an EA-PS 3016-20 B power supply (Figure 2) by EA Elektro-Automatik GmbH & Co.
- a high performance 6 ½ digits precision multimeter (Figure 3), model Agilent 34401A (Agilent Technologies)
- a CORIO C heating immersion circulator equipped with a bath tank BT9 by Julabo (Figure 4)

Fig. 1: a Z+ 20-10 power supply

Fig. 2: EA-PS 3016-20 B power supply

Fig. 3: high performance 6 ½ digits precision multimeter
Fig. 4: CORIO C heating immersion circulator
Research activities
- SHAPE MEMORY ALLOY (SMA) ACTUATORS: activities are dedicated to the characterization of both alloy and shape memory-based actuators (wires, springs) to determine the optimal properties of the material for the application under investigation.
-
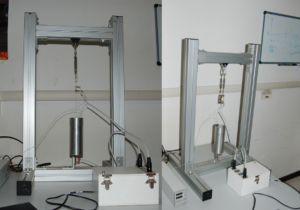
Fig. 5: testing setup Neuro-motor rehabilitation: testing benchmarks for SMA wires and springs have been developed, in order to characterize them as electrically powered actuators. One of the activities performed in the Active-lab is the investigation of the SMA self-sensing phenomenon, i.e. the capability of such alloys to act as an actuator and a sensor at the same time. Figure 5 reports the testing setup for wire and spring actuators, while Figure 6 reports a plot about the relationship between actuation and electrical resistance variation of a Nitinol wire. The development of actuators in the field of neuro-rehabilitation robotics (Figure 7) have been conducted in collaboration with Fondazione Istituto Maugeri
- Grippers: testing benchmarks for SMA wires have been developed, in order to characterize them as electrically powered actuators for the development of smart gripping systems (Figure 8).
-
- 3D PRINTED SOFT ACTUATORS: activities are dedicated to the characterization of both 3D printed material and associated soft actuators to determine the optimal properties of the material for the application under investigation.
- Shape memory polymer (SMP) actuators: one of the activities performed in the Active-lab is the investigation of the shape memory effect in polymers for the development of smart soft actuators (Figure 9).
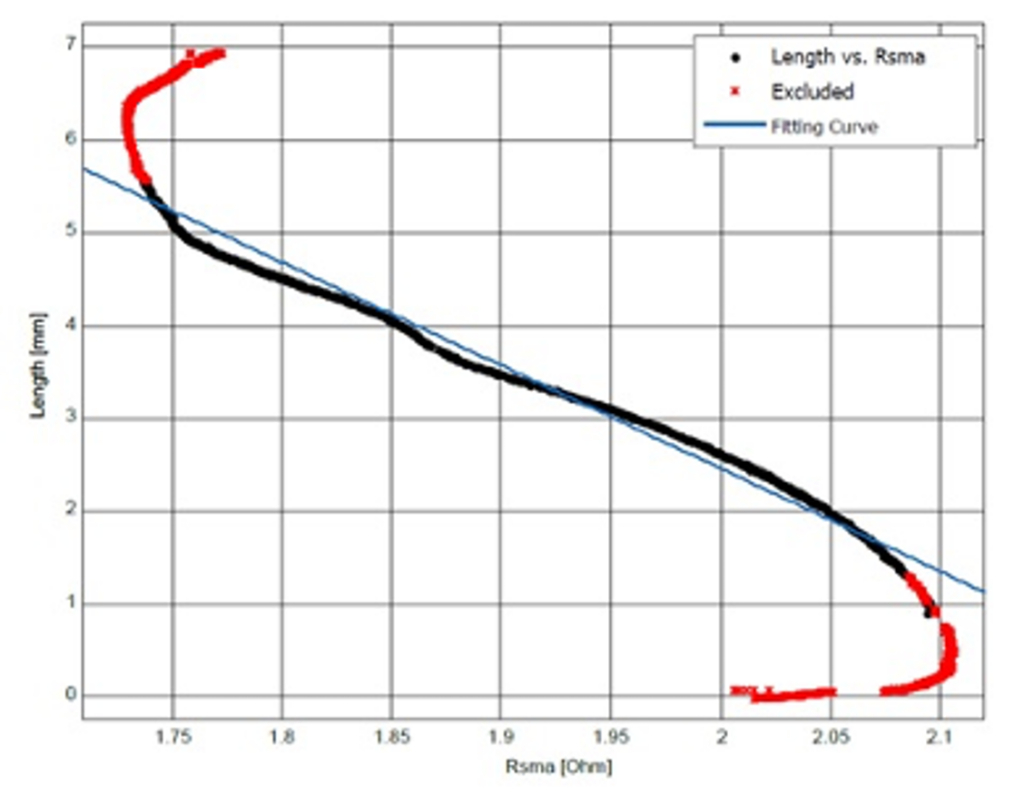
Fig. 6: Contraction of the Nitinol wire versus its electrical resistance variation.
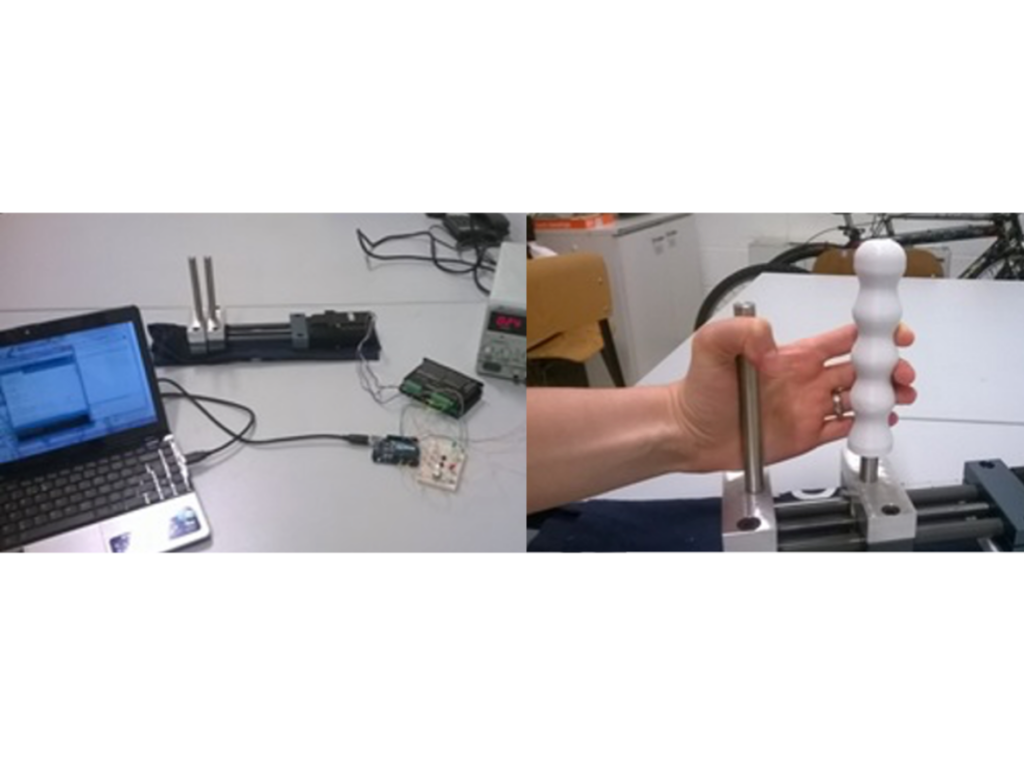
Fig. 7: Experimental equipment for the research activity in the field of neurorehabilitation robotics.
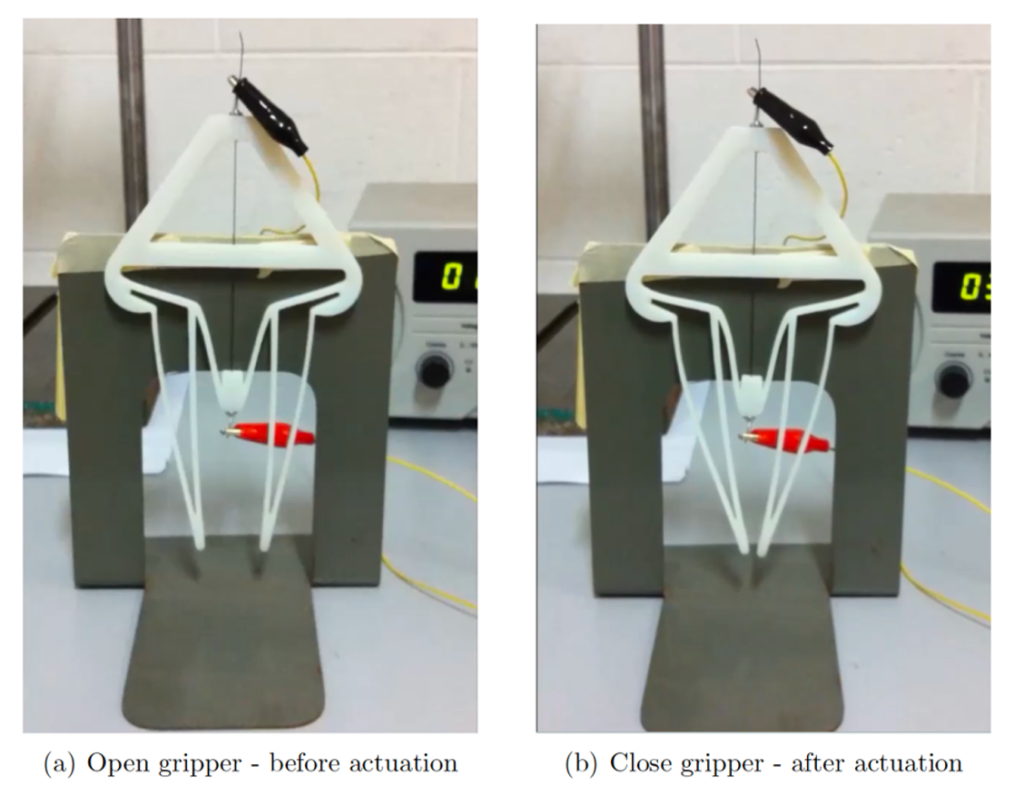
Fig. 8: Experimental equipment for the research activity in the field of smart grippers (source: LM thesis by Luca Marioni).
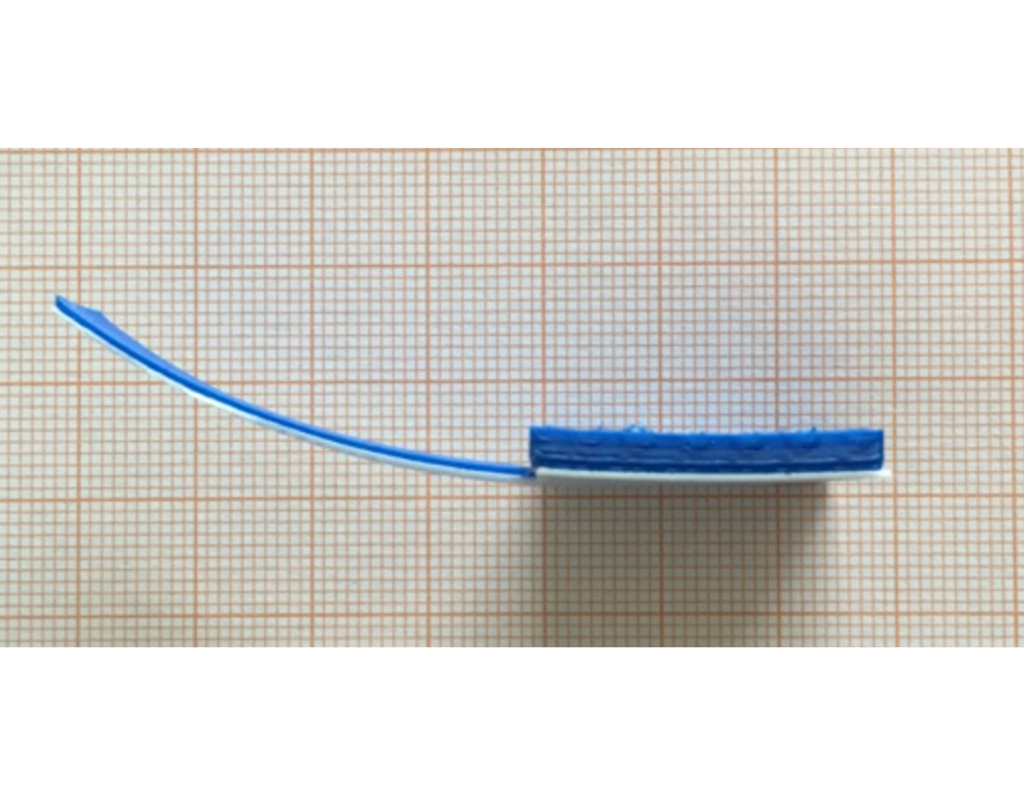
Fig. 9: 3D printed beam-shaped actuator featuring the shape memory effect after printing through heating.